When running the guide rail or outer shaft motor for the first time, there may be external shaft shaking or unstable operation due to different corresponding loads. At this point, it is necessary to adjust the PID parameters of the outer shaft.
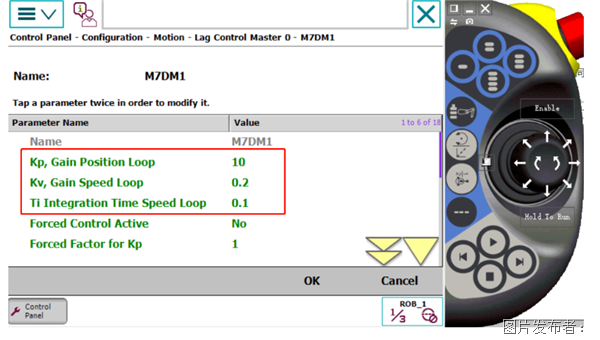
You can enter the teaching pendant – Configuration – Theme Motion Lag Control Master0 and select the corresponding outer axis for parameter adjustment.
Generally, the first step is to adjust Kv (speed gain). Increasing Kv can increase the stiffness of the servo, and excessively high Kv can cause external shaft vibration.
Secondly, adjust Kp (position gain). Increasing Kp will improve the external axis responsiveness, and excessive Kp can easily cause oscillation. Increasing Ti (integration time) can reduce overshoot.
All modifications to the values here require a restart to take effect.
For the convenience of online debugging, the following code can be used to adjust the PID parameters online (the adjustment ratio is 1-500% of the configuration parameters). Running the code will take effect. This way, there is no need to modify parameters and restart every time.

When debugging is complete, manually write the current PID parameters into the configuration and restart (for example, if the kv in the configuration is 0.2 and 200% is used in the program, directly write 0.4 in the configuration).
Post time: Aug-05-2024